什么是CAN?
CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,由德国的BOSCH公司开发,并最终成为国际标准(ISO 11898),是国际上应用最广泛的现场总线之一。
怎么选择CAN芯片?
1,数据速率:指的是单位时间内,通信线路上传输的二进制位的数量。根据应用场景的需求,选择合适的数据速率。高速CAN收发器的最高速率为5Mbps,CAN FD的最高速率可达8Mbps,而传统的CAN最高速率仅为1Mbps。
2,电源电压:了解收发器的电源电压范围,确保其与实际供电系统兼容。
3,共模电压:CAN通信协议的共模电压主要涉及到显性信号和隐性信号的不同电压要求。在CAN通信中,共模电压是一个重要的参数,它直接影响到通信的可靠性和稳定性。
CAN总线外围电路设计
在汽车应用中,EMC问题是一个被广泛关注的问题,而与传统汽车相比,新能源汽车的EMC问题更加突出,因此对于汽车中大量使用的总线接口芯片的EMC性能要求也比较高。为了获得较好的EMC性能,除了芯片选型的考虑之外,系统中芯片外围电路的设计也是至关重要的。这一部分将着重介绍一下CAN芯片外围电路的一些参考设计。
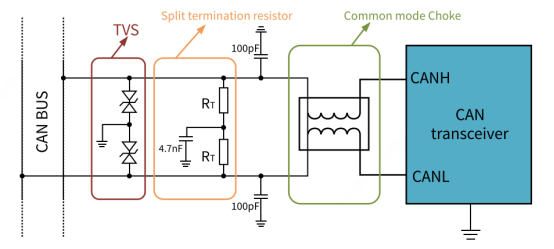
1,共模电感
共模电感的特性是对于共模信号表现较高的阻抗,对于差模信号表现较低的阻抗,所以对于共模噪声干扰 有较强的抑制作用。
1)电感值的选取
对于电感值的选取我们需要从抑制总线共模噪声方面去考虑。在CAN 总线的共模噪声频率处,共模电感应具有尽可能高的电感值,表现为高阻抗抑制共模噪声的传播,电感值较小对于共模噪声的抑制效果会不佳,而电感值较大又会有尺寸和成本方面的限制。建议对于500kbps的CAN通信可以采用51uH电感值的共模电感,对于2Mbps的CAN FD 通讯可以采用100uH电感值的共模电感。
2)直流电阻的选取
共模电感的直流电阻越大,总线信号的损耗越大,传输效率越低。在确定了共模电感的电感值后,应该选取直流电阻尽可能小的共模电感。
2,终端分立电阻
ISO11898标准规定互连线为单双绞线(屏蔽或非屏蔽)120 Ω特性阻抗(ZO)。应使用等于线路特性阻抗的电阻来终止电缆的两端,以防止信号反射。连接节点到总线的未端接的插线(存根)应尽可能短,以尽量减少信号反射。
终端通常是一个120 Ω电阻在总线的每一端。如果需要对母线的共模电压进行滤波和稳定,则可以使用分路端接。拆分使用两个60Ω电阻器,在这些电阻器的中间有一个对地电容。通过消除消息传输开始和结束时总线共模电压的波动,分离终端改善了网络的电磁发射行为。
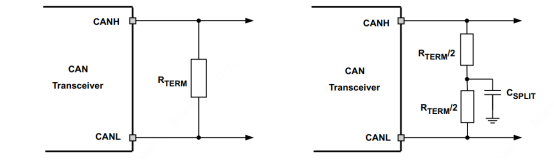
(左)标准终端
(右)分离终端
3,总线电容
除了通过总线上加共模电感以及采用分立终端匹配电阻的方法来提升CAN总线的EMC性能,分别在CANH和CANL上加一个对地电容,也可以滤除总线上的一些高频噪声,能在一定程度上提升CAN总线的EMC性能。当然对地电容值的选取需要综合考虑多种因素,如果电容过大,会导致总线信号衰减,上升和下降时间增大,缩短bit时间,影响总线正常通讯;同时对地电容容值与信号源的阻抗所组成的RC低通滤波器截止频率应高于CAN总线的通讯速率,保证 CAN 总线的正常通讯。所以需要综合考虑总线长度、节点数量、数据速率等因素来选择合适的对地电容。一般建议对于2Mbps的CAN FD通讯,总线对地电容不超过100pF。
4,ESD保护二极管
在汽车或者工业应用中,对于一些有外部连接接口的系统,在安装和维护过程中积累的过量电荷会通过接口线缆流入模块,这些放电能量足够高有可能高达几十kv,那么位于接口端的接口芯片就会首当其冲,被放电能量损坏,导致系统无法工作。所以保护接口收发器免受ESD的影响对于系统应用来说至关重要。对于CAN收发器,虽然芯片内部设计了相关的ESD 保护电路,但是受限于芯片尺寸,一般总线端的ESD 防护能力远远达不到一些环境下的ESD 冲击。因此,需要使用外部ESD保护二极管来提升系统端的ESD防护能力,TVS二极管结电容较大,适合在低速CAN总线上使用;ESD静电保护器件结电容较小,适合在高速CAN总线上使用。
CAN总线常见问题和解决方法
CAN总线作为一种常用的通信协议,在汽车、工业自动化等领域得到广泛应用。然而,由于各种原因,CAN总线在使用过程中可能会出现各种故障,本文将讲解CAN总线应用过程中的常见问题和解决办法。
1,CAN总线节点硬件错误问题
CAN总线上的数据采用不归零编码方式,显性和隐性同时传送时,总线的结果值为显性。而对于具有TXD显性超时保护功能的CAN收发器,在TXD引脚显性时间超过允许最大的时间tDOM后,发送器将被禁能,收发器输出表现为隐性状态,根据CAN协议(ISO 11898),除了错误帧和过载帧(允许6个相等显性位),CAN帧报文中在5个连续相等位后,发送器自动插入一个与之互补的补码位;接收时,这个填充位被自动丢掉。例如,5个连续的高电平位后,CAN自动插入一个低电平位。
由于CAN总线显性电平的“支配地位”,在CAN总线组网时,若有其中一个CAN节点出现硬件或者软件上的错误,使控制器TXD引脚持续处于低电平,则会使总线电平持续保持在显性状态,总线上所有节点均不能正常通信,导致总线瘫痪。
若总线节点数量众多,确定问题节点将是一项艰巨的任务,TXD显性超时后,发送器将被禁能,收发器输出表现为隐性状态,总线将不受该节点影响,从而保证总线的正常通信。收发器下一个显性输出只有在释放了TXD后才可以产生。
解决方法
1)推荐使用支持TXD显性超时保护功能的CAN芯片:SIT1050T,SIT1040T,HMT1040T,HMT1050T,带TXD显性超时保护功能的CAN收发器可以有效防止出错的CAN控制器通过发送持续的显性TXD信号将总线箝位在显性电平,保证了总线通信的鲁棒性。
2,低波特率通信正常,高波特率无法通信。
控制器配置低波特率通信正常而提高通信速率后无法通信的问题,主要是由于终端电阻未匹配导致的。解决方法如下:
1)匹配适当的终端电阻;
3,总线电容过大导致的通讯异常。
CAN节点及CAN线束的电容会影响整个网络的电容,电容越大,下降边沿越缓,导致接收节点发生位采样错误,从而产生错误帧。解决方法如下:
1)检查CAN总线上是否有外加电容、是否有保护器件(TVS等)的寄生电容过大等问题,适当去除,以降低电容,建议将单个CAN节点电容控制在 40pF~100pF范围内;
2)降低工作波特率,波特率降低可以延长位时间,减小电容的影响,但若电容过大,则不一定有效;