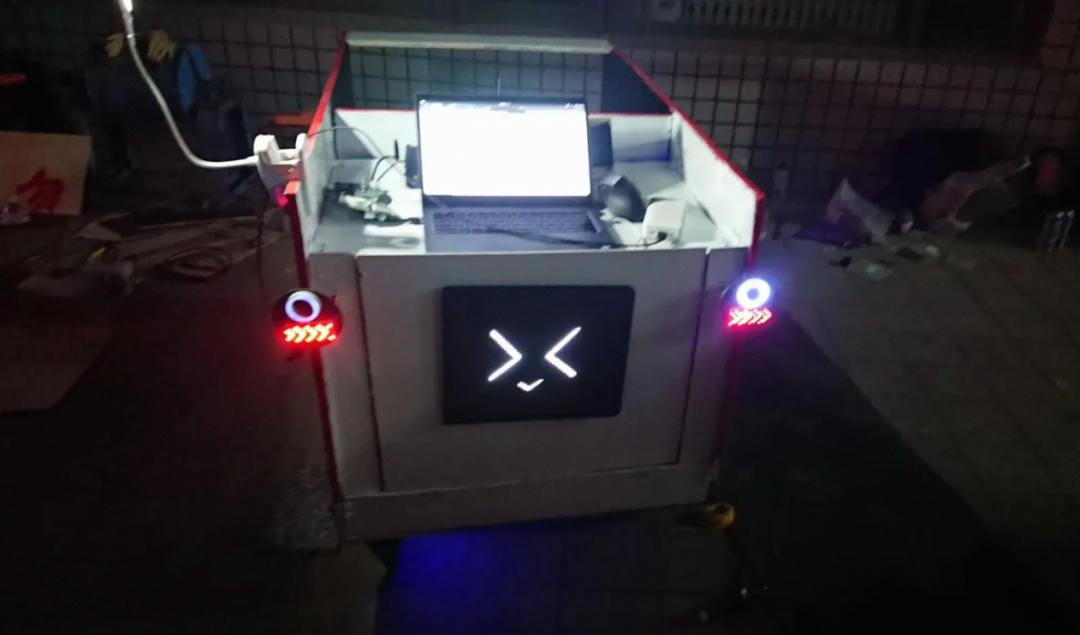
做了一个智能物流车!全开源了!

它可以远程遥控也!


同时小车屏幕还能显示自定义表情,文字

那作者是咋实现这些功能的呢?
这个小车是怎么设计出来的呢?
我们一起看看作者的开源方案吧~
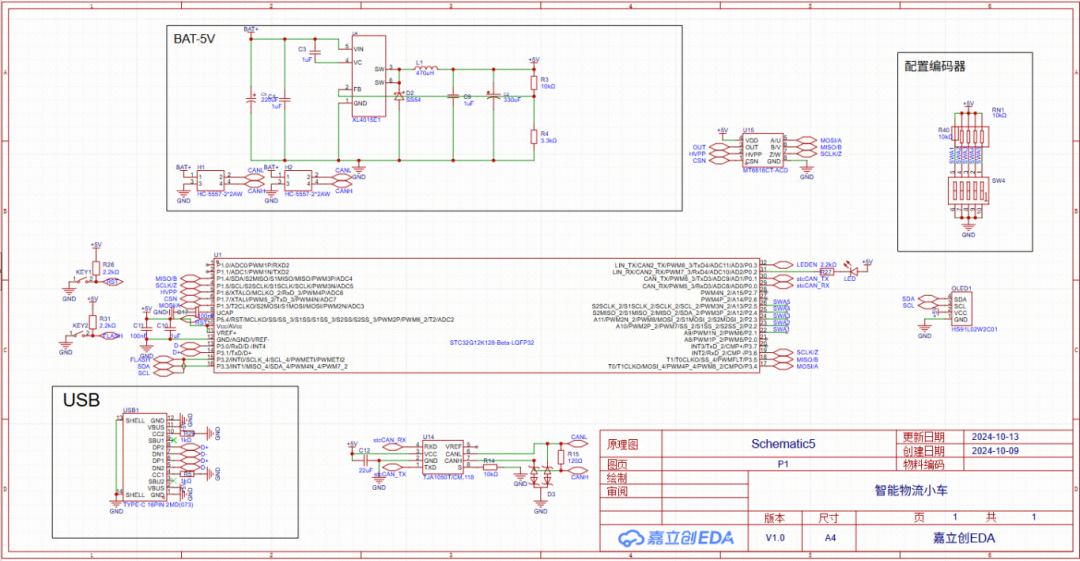
小车的电路设计由这5个模组构成——测速模组、电机驱动及转向模组、运动学解算模组、转向灯模组、CAN分线模组
(1).测速模组
原理图

PCB图
(2).电机驱动及转向模组
电机驱动及转向模组由STC8H8K64U驱动,驱动两个最大240w的H桥以及充电检测与保护部分组成,预留IIC、UART、以及PWM排针接口。
通过PWM控制25kg舵机完成转向。

原理图
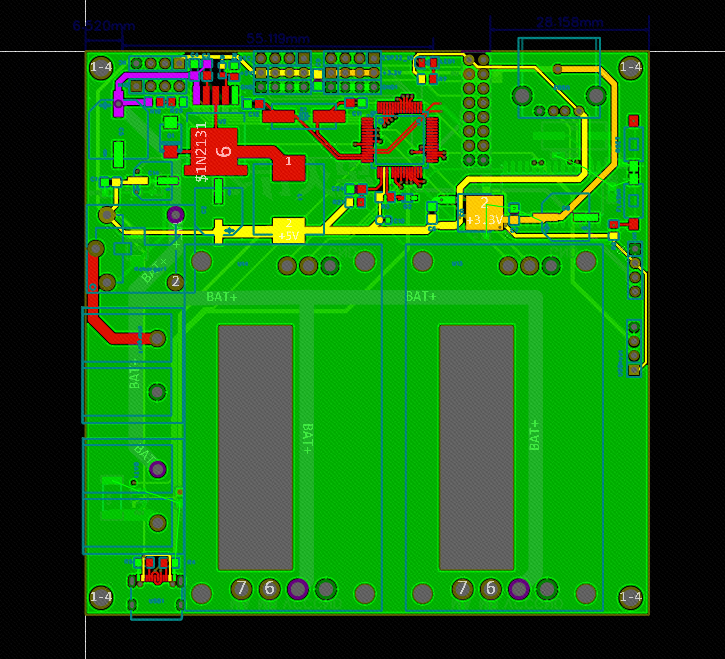
PCB图

图2.3电机驱动及转向模组部署
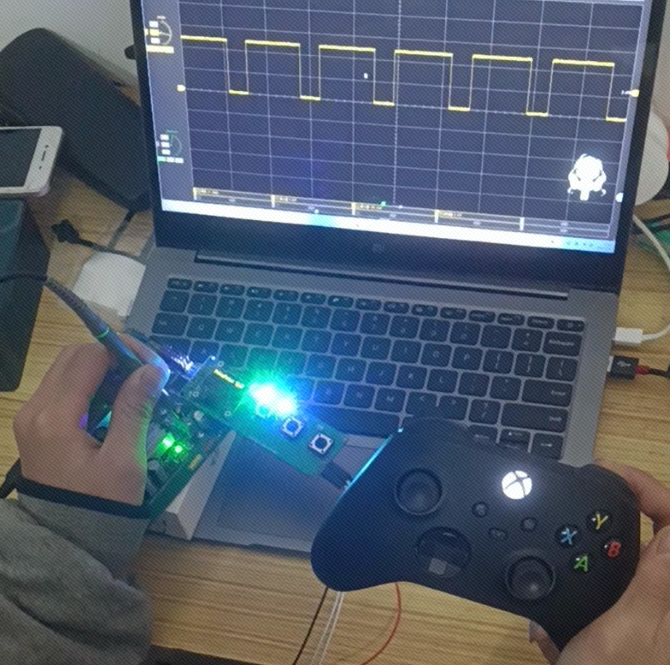
图2.4 电机驱动及转向模组PWM测试
(3).运动学解算模组
运动学运动学驱动模组由STM32F407VET6驱动,完成磁编码器、IMU、GPS数据融合解算,其中ESP32辅以连接上位机,提供用户GUI以及保存配置信息。
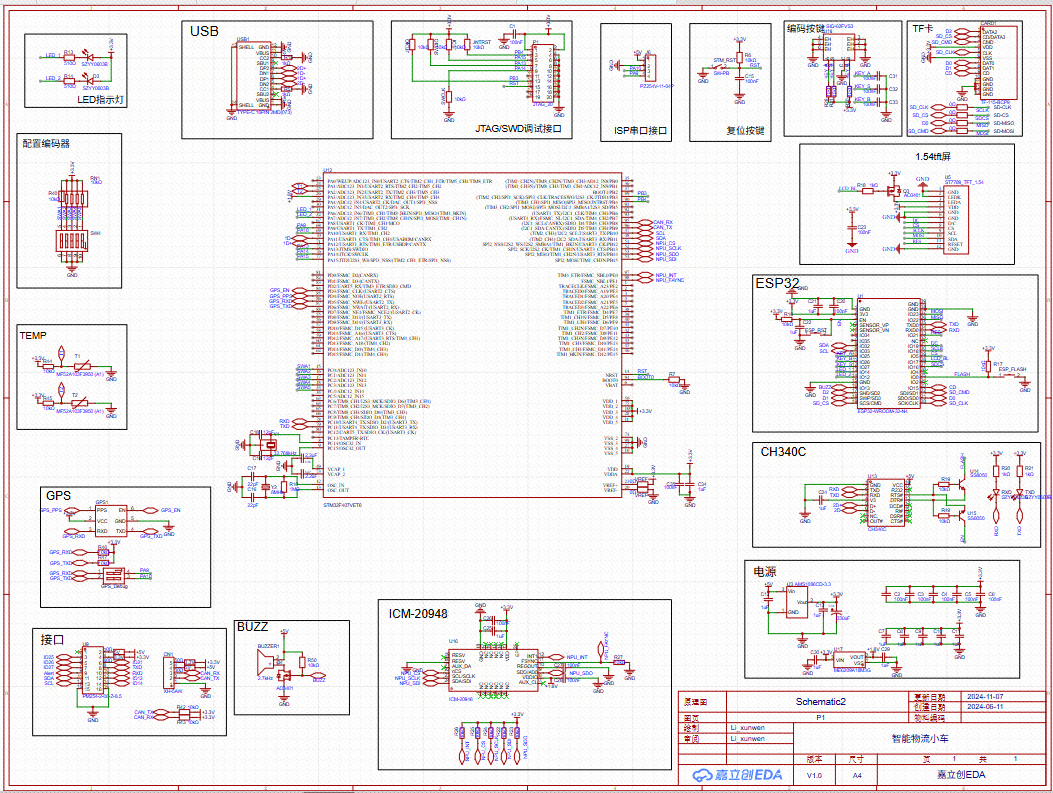
原理图
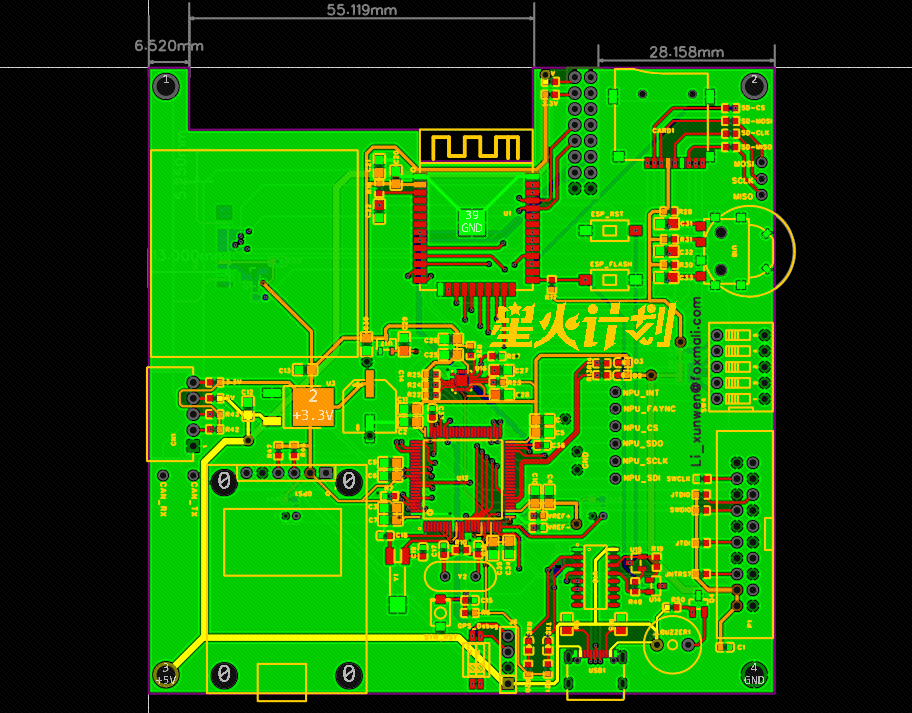
PCB图
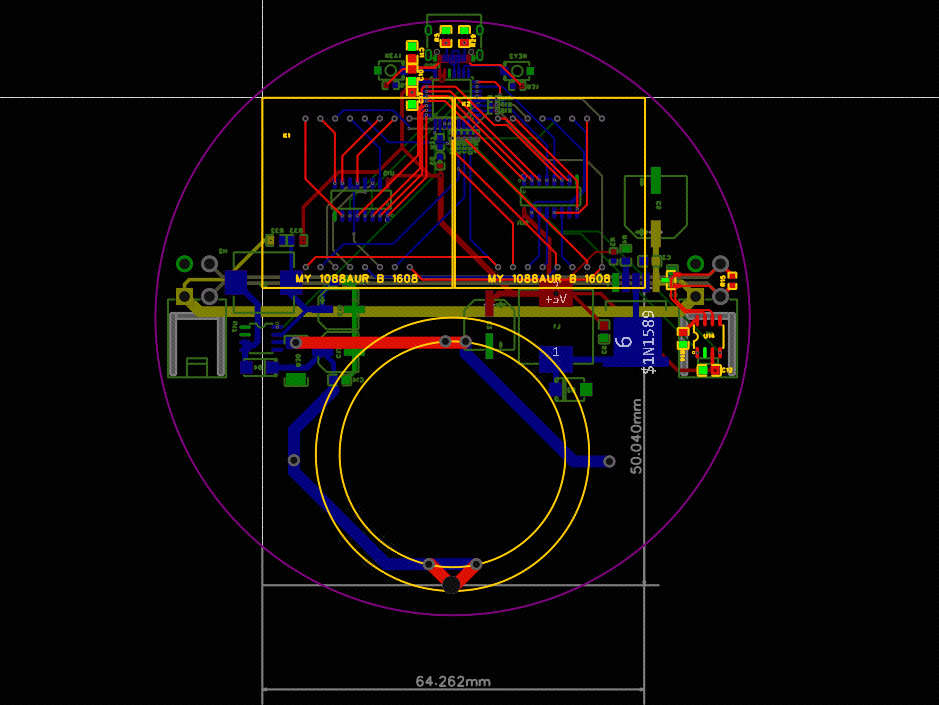
(4).转向灯模组
转向灯模组由STC32g12k128驱动MT6816CT编码器。
当轴旋转零点时LED灯状态反转。
该模组通过struct TotalData结构体对封装CAN数据帧/遥感帧,并通过联合体union FloatToBytes进行编码解码。
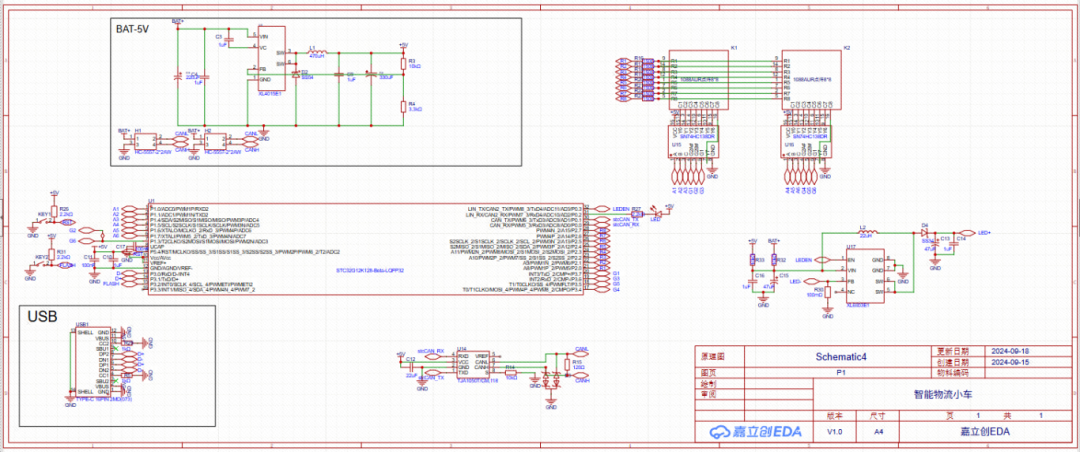
原理图
原理图
(5).CAN分线模组
CAN分线模组由STC32G8K64驱动,用以测试CAN总线与拓展CAN总线.
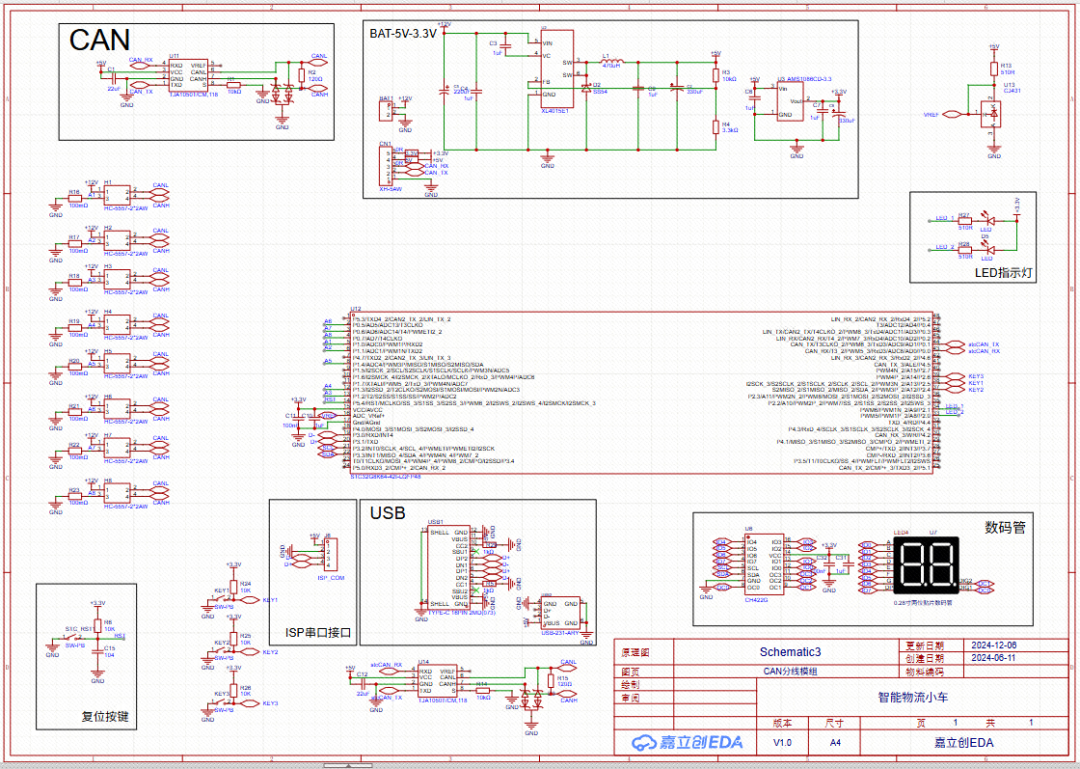
原理图

PCB图
如何控制小车显示屏?
笔者这里利用ESP32的webserver库写了一个前端软件,方便控制显示屏:
连接局域网到显示屏的ESP32,打开http://esp32sd.local/即可
显示屏驱动来源于爆改车间主任。
如何实现远程控制小车?分享一下秘籍!
小车分为三个驱动模组,由CAN分线模组、电机驱动及转向模组、运动学驱动模组组成,最后通过预留的TTL接口连接Ubuntu主机实现远程控制。
结构体struct Car中描述了车的状态与控制状态,在该结构体完成数据封装后通过上图联合体union CarBtoB进行传输编码和解码。
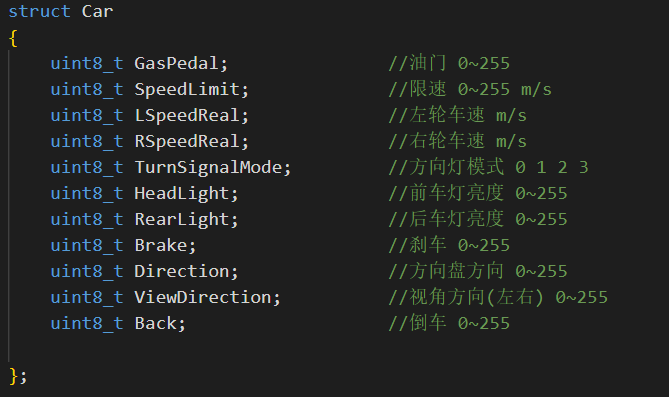
图 1.1 Datasheet.h中Car结构体
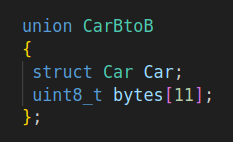
图 1.1 Datasheet.h中Car结构体
图1.2 Datasheet.中CarBtoB联合体
那具体怎么做呢?
下滑看教程!!

(1)部署教程
选用N280的一台工控机作为主机。
1.1安装ubuntu20.04系统,安装edge浏览器。
1.2安装npm,使用命令sudo apt-get install npm
1.3启动服务
下载 Github Intelligent-logistics-car-webserver 解压后打开命令行,cd到目录
通过命令npm run dev 启动服务
(2)配置&调试
2.1配置链接
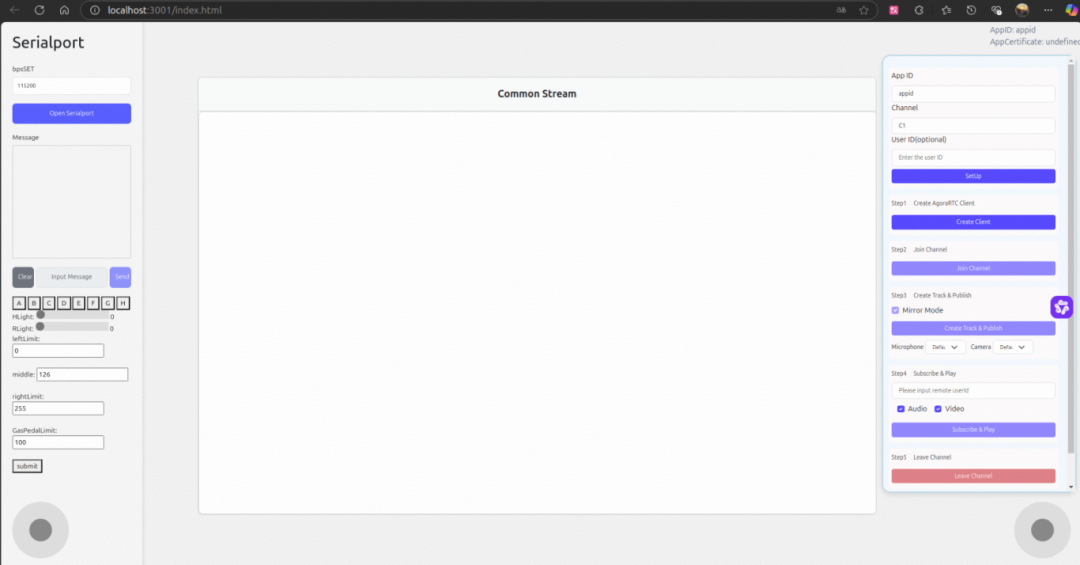
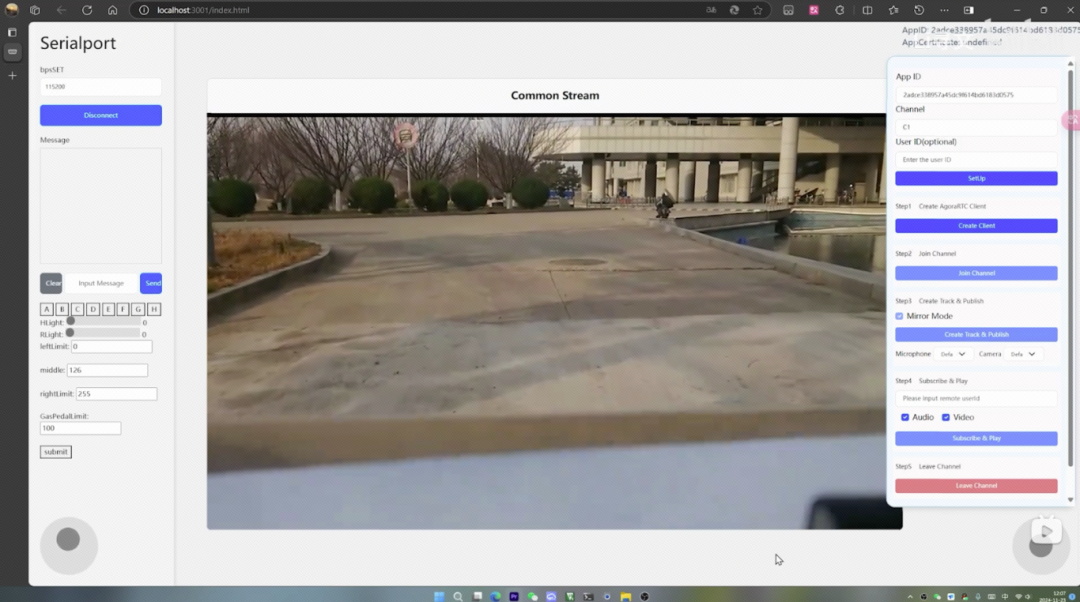
成功启动服务后打开edge打开http://localhost:3001/index.html即可进入控制面板
2.2注册声网帐号
根据 声网-实时互动服务开通教程 得到appid
2.3配置远程设备
在远程端用上述同样的方式配置服务即可连接
这里不管是小车端还是远程端都可以通过蓝牙连接xbox手柄实现控制
2.4连接主控

主机通过串口连接主控,并在面板配置连接。注意type-c的正反面分别连接ESP32与STM32,上位机默认连接STM32进行调试。
2.5调试指南
xbox连接成功后,拨动右扳机,观察屏幕示数是否变化。

通过上位机leftLimit(左限位),middle(居中位),right(右限位),以及配合车架的桥臂调整共同完成转向调平


GasPedalLimit为设置油门限位,油门范围为0~255。
这个中型载货小车,预计驱动功率600w。
通过连接ONENET平台提供的MQTT服务,以及Agroa声网提供的云视频服务,进行人工后台介入操控。
在驱动电机中使用磁编码器进行闭环的差速控制。
本项目已开源!
——想复刻?想给作者点赞?可复制开源网址 前往原文。
开源网址:https://oshwhub.com/li_xunwen/intelligent-logistics-car