所谓力觉是指机器人作业过程中对来自外部的力的感知,它和压觉不同,压觉力是垂直于力接触表面的力、三维力和三维力矩的感知。机器人力觉传感器是模仿人类四肢关节功能的机器人获得实际操作时的大部分力信息的装置,是机器人主动柔顺控制必不可少的,它直接影响着机器人的力控制性能。分辨率、灵敏度和线性度高,可靠性好,抗干扰能力强是机器人力觉传感器的主要性能要求。就传感器安装部位丽言,力觉传感器可分为腕力传感器、关节力传感器、握力传感器、脚力传感器、手指力觉传感器等。~
腕力传感器
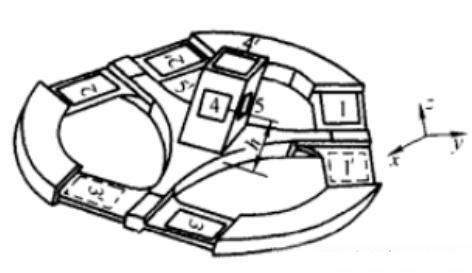
腕力传感器是一个两端分别与机器人腕部和手爪相联接的力觉传感器。当机械手夹住工件进行操作时,通过腕力传感器可以输出六维(三维力和三维力矩)分量反馈给机器人控制系统,以控制或调节机械手的运动,完成所要求的作业。腕力传感器分为问接输出型和直接输出型两种。间接输出型腕力传感器敏感体本身的结构比较简单,但需对传感器进行校准,要经过复杂的计算求出传递矩阵系数,使用时进行矩阵运算后才能提取出六维分量。直接型腕力传感器敏感体本身的结构比较复杂,但只需要经过简单的计算就能提取出6个分量,有的甚至可以直接得到6个分量。
腕力传感器的系统硬件通常由传感器和信息处理两部分组成。传感器部分由弹性体、测量电桥和前级放大器组成,主要完成敏感六维分量,并进行信号前级放大的任务。信号处理部分包括后级放大、滤波、信号采样保持、AD转换以及进行系统控制、计算和通信的微机系统,整个系统框图如图所示。
腕力传感器系统软件一般包括数据采集和AD转换控制软件、非线性校正和矩阵解耦运算软件、系统通信及输出软件等。
腕力传感器的优缺点:
1.腕力传感器虽然结构较复杂,但原理比较类似,一般都是通过应变片来测量内部弹性体的变形,再解耦求得多维力信号。
2.腕力传感器获得的力信息较多(如六维腕力传感器),分辨率、灵敏度和精度高,可靠性好和使用方便。
3.腕力传感器对不同类型的机器人能实现通用化,所以得到广泛的应用。
4.弹性元件一般为整体结构,加工极为困难。
5.应变片粘贴过程复杂,应变片的输出信号较弱,需要高性能的放大器,市场上供应的放大器体积较大。
6.从腕力传感器的工作原理可以看出,腕力传感器工作时产生的变形必将影响机器人操作臂的定位精度。
7.由于传感器设计、制造上的原因,使得传感器的输出信号与实际六维向量的分力之间存在相互耦合作用,即传感器的相互干扰,这种干扰非常复杂,难以从理论上进行分析和解耦消除,通常需要采用实验方法进行标定。
握力传感器
光纤握力觉传感器单元如图所示,所用的光纤是50um、125um的多模光纤,波纹板是由两块相互啮合的V形槽板组成,为了保持平衡,在槽的另一端放置一根不通光的虚设光纤,板的厚度为3mm。当物体压力作用于握力觉传感器时,波纹板的上盖相对于下盖位移,使光纤产生变形,通过测量光信号的衰减可间接得知压力的大小。在设计、制作之后,对系统性能进行测试。测量结果范围大、灵敏度高、效果良好。力的分辨率为59,测量范围为0至2500g。系统作为一独立的部分,通过串行口与控制微机相连,接口简单方便。
脚力传感器
二足步行机器人在人类生活的环境中应用较为方便,但不稳定,控制较复杂。为了解步行时的状态,需装各种传感器,其中脚力传感器是与外界接触的传感器,对步行控制来说是相当重要的。
手指式力传感器
手指式力传感器,一般通过应变片或压阻敏感元件测量多维力而产生输出信号,常用于小范围作业,如灵巧手抓鸡蛋等实验,精度高、可靠性好,渐渐成为力控制研究的一个重要方向,但多指协调复杂。
内容声明:本文转载自其它来源,转载目的在于传递更多信息,不代表立创商城赞同其观点和对其真实性负责,仅作学习与交流目的使用。