


本文作者:立创开源硬件平台 OSHWHub 用户@爆改车间主任,禁止商用,未经许可禁止转载,点击查看原文章
1、工程描述
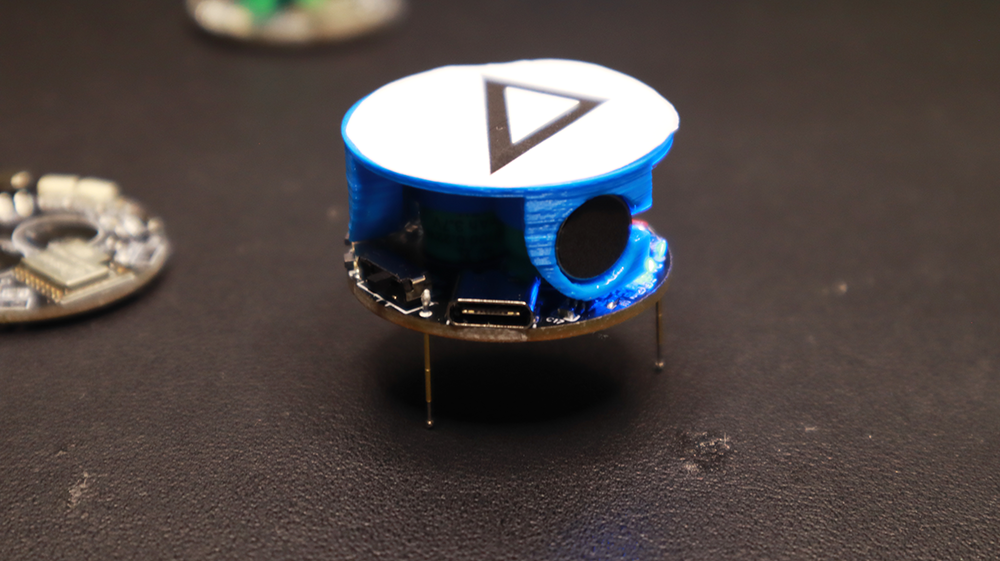
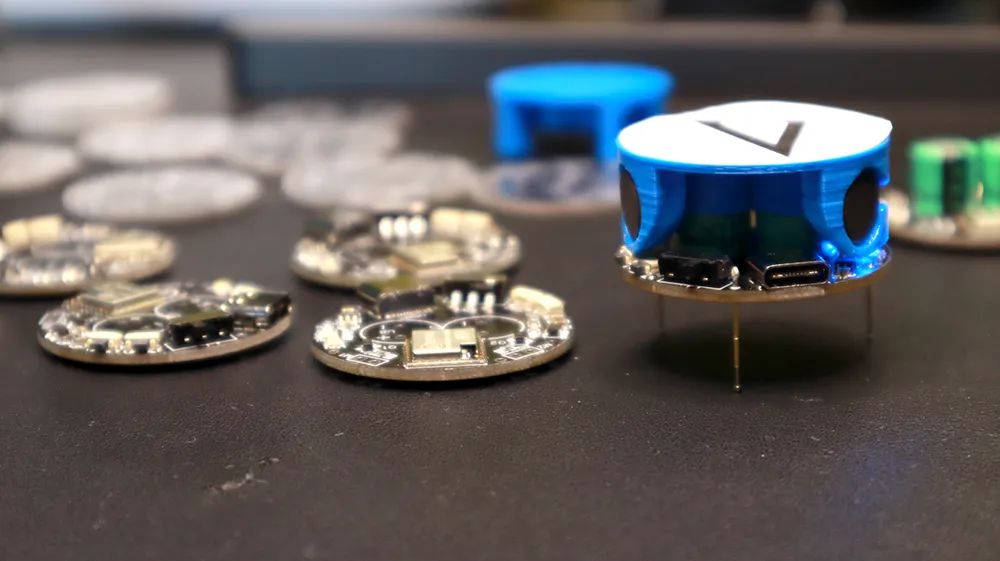
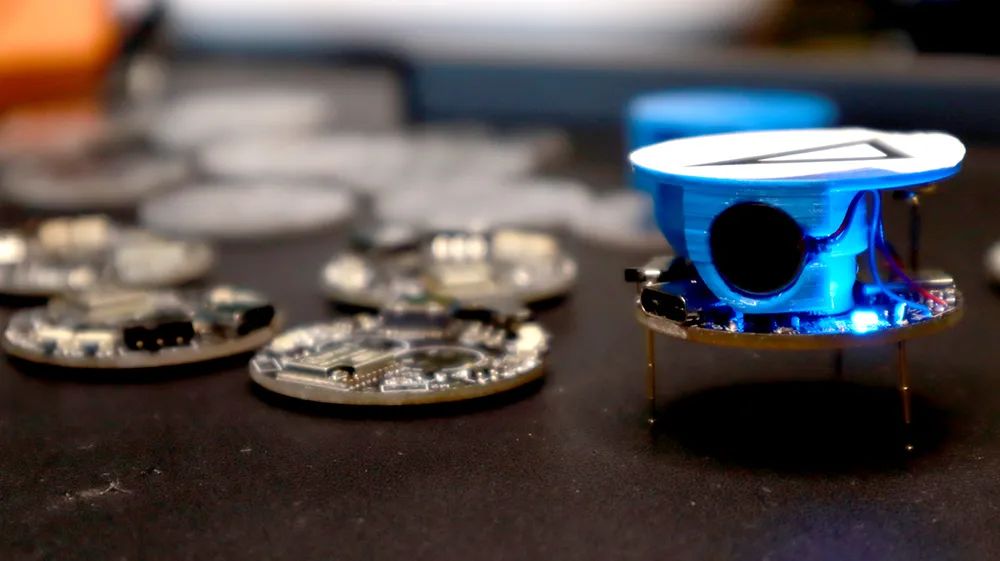
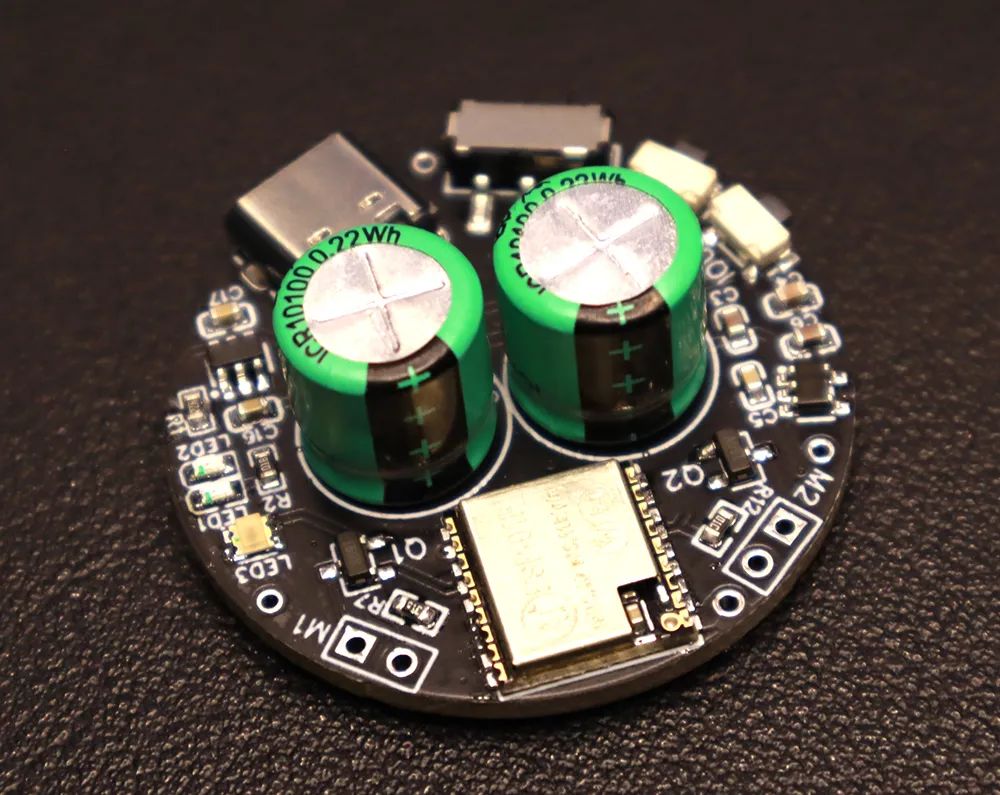
爆改车间主任的NN机器人项目,ESP8285为核心搭建振动运动微型机器人,python+openCV视觉控制规划机器人路径控制机器人轨迹运动。模仿kilobot的运动结构制作的了这个微型的振动机器人,靠两个振动电机来控制机器人的前进和转向。
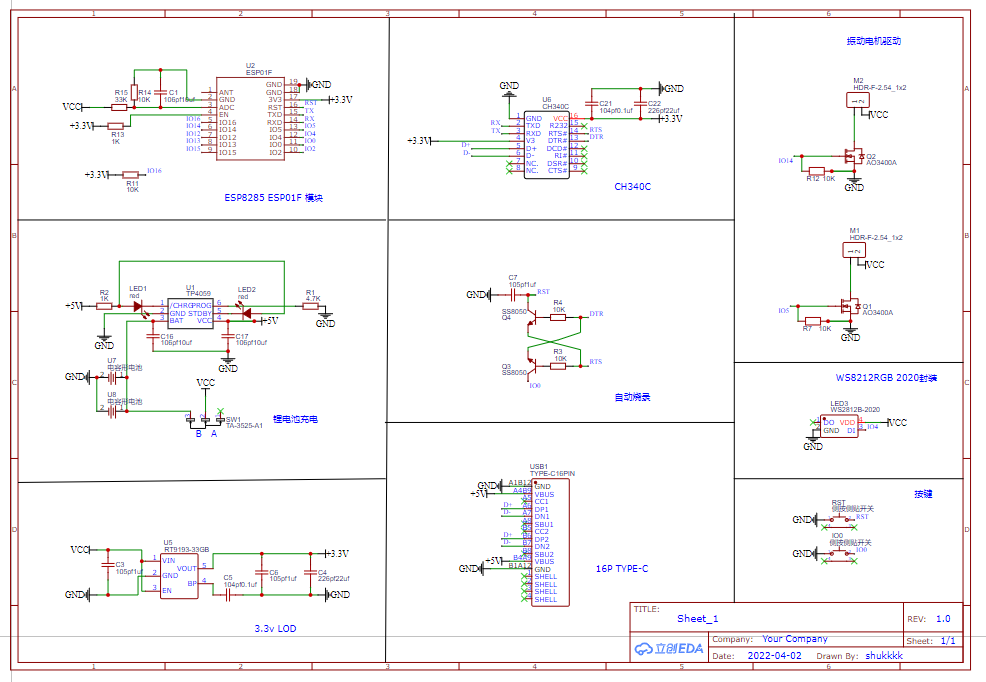
ESP-01F为模块主控,两个MOS管驱动振动电机,电路非常简单,电池使用了两粒电容形状的锂电池,主板上即成了串口转USB和充电电路。
● 单片机使用Arduino IDE 环境开发 附件中:NN-Robot_V1.0.ino
● 上位机Python3 + openCV开发 附件中: NN机器人路径规划.py
● 3D打印盖子 附件中:NN机器人盖子.STL
● 需要外设:USB摄像头
2、成品展示

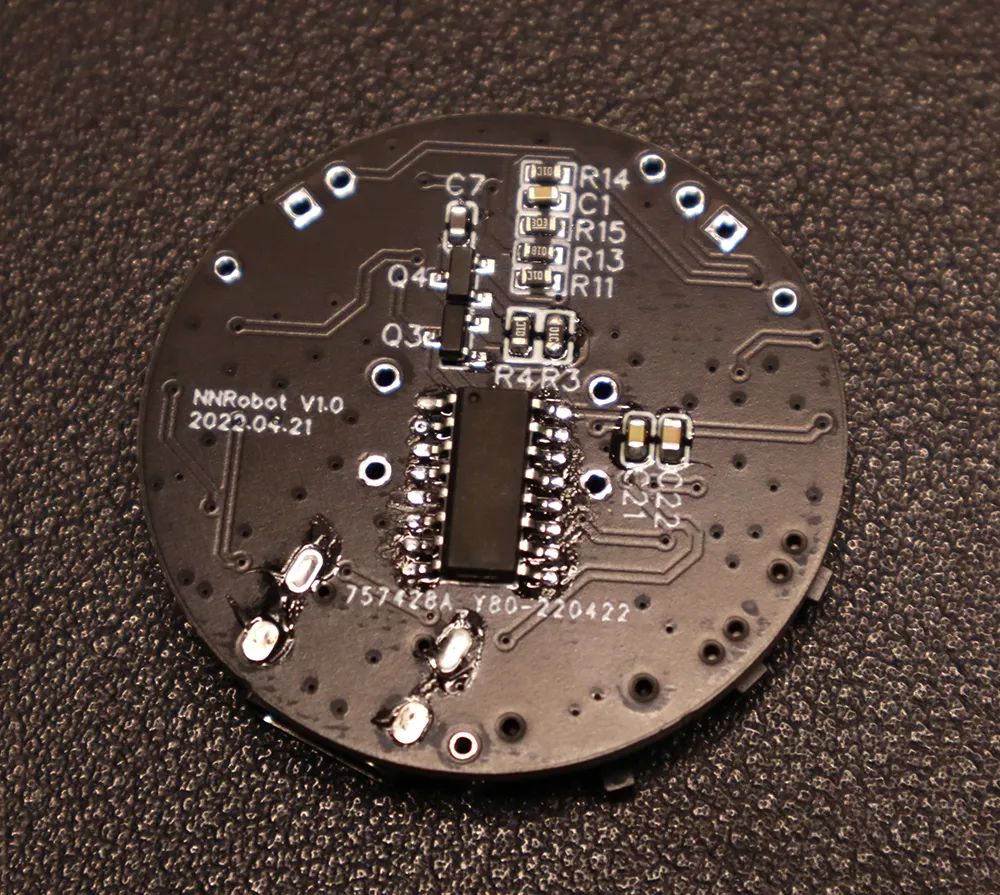
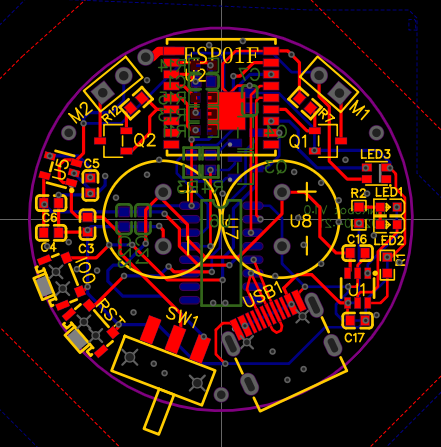
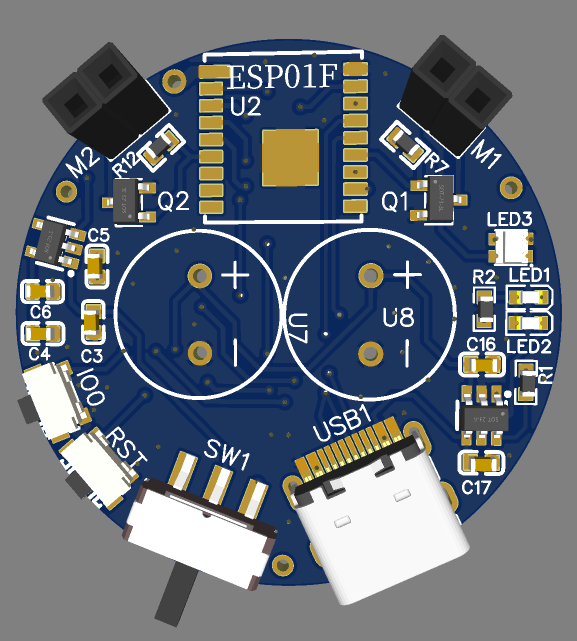
3、电路设计欣赏
更多详情及附件,可从原工程查看。
本文作者:立创开源硬件平台 OSHWHub 用户@爆改车间主任,禁止商用,未经许可禁止转载




