
工程作者:birdd
大三学生,手搓了一个这样的多模态仿生轮腿探测机器人!
▼
B站首发,播放量17万+

看呀↓大家伙的“喜爱”之情溢于言表~

这究竟是一个怎样的小车?
接下来,咱就瞅瞅它的功能&亮点,硬件设计方案,文末还会附上开源网址。(开源内容包含结构stp文件、打印切片文件、程序源码)
这个机器人的结构设计融合了——轮式驱动与四足步态。这样设计的初衷是希望它能用于灾后的搜救任务, 适应复杂环境……就像这样:
1.越野步态
在平坦路面能依靠四轮快速移动,在崎岖地形中又能 切换为仿生步态 跨越障碍
2.越野步态

3.可载物
后空翻版↓
bushi 再来一次
3KG载物目前是OK的↓不过碰到舵机扭矩上限还是容易栽,害
4.一些才艺

太酷了!太稳了!
那么,想实现这些功能,具体要怎么设计呢?
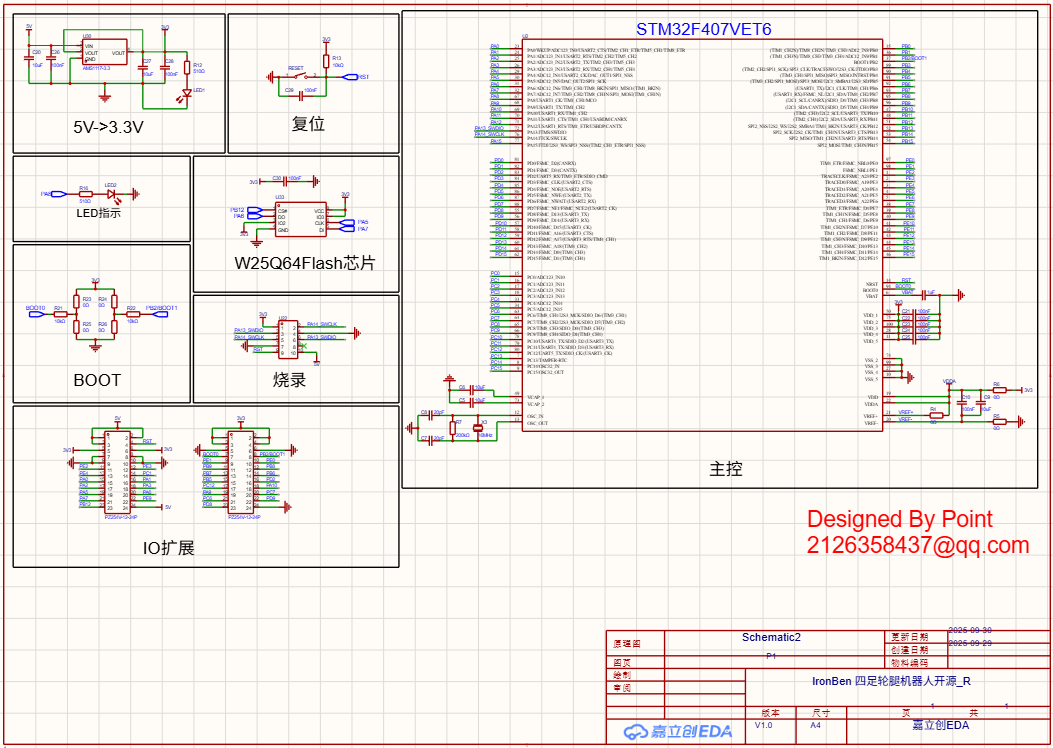
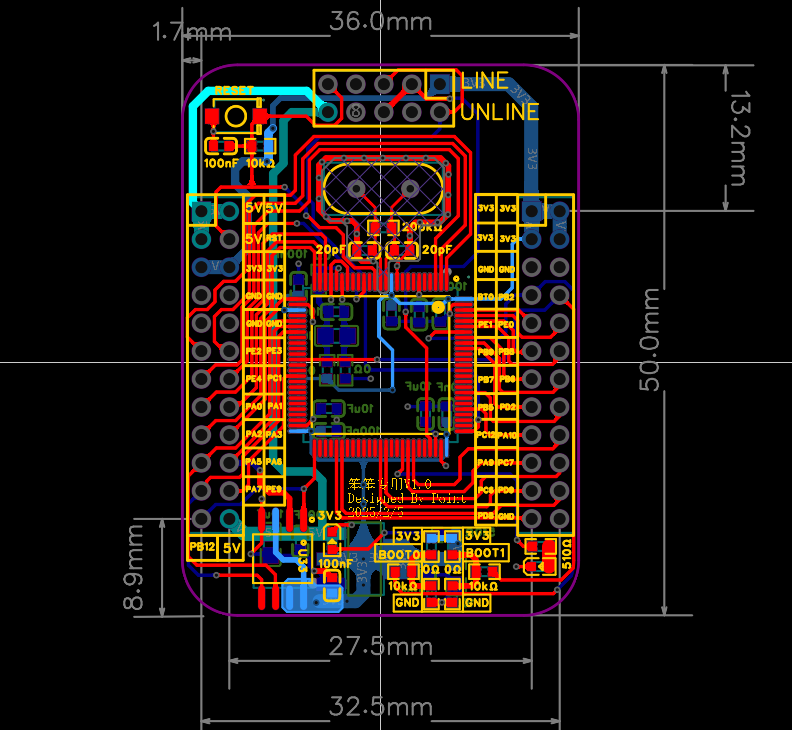
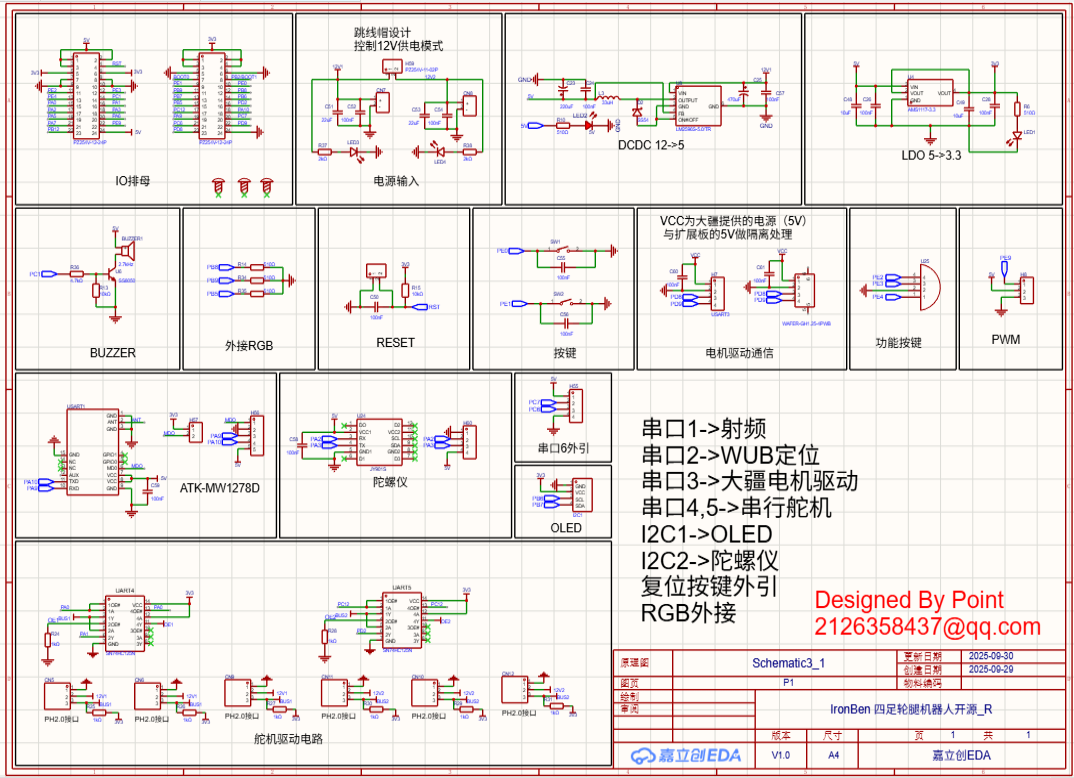
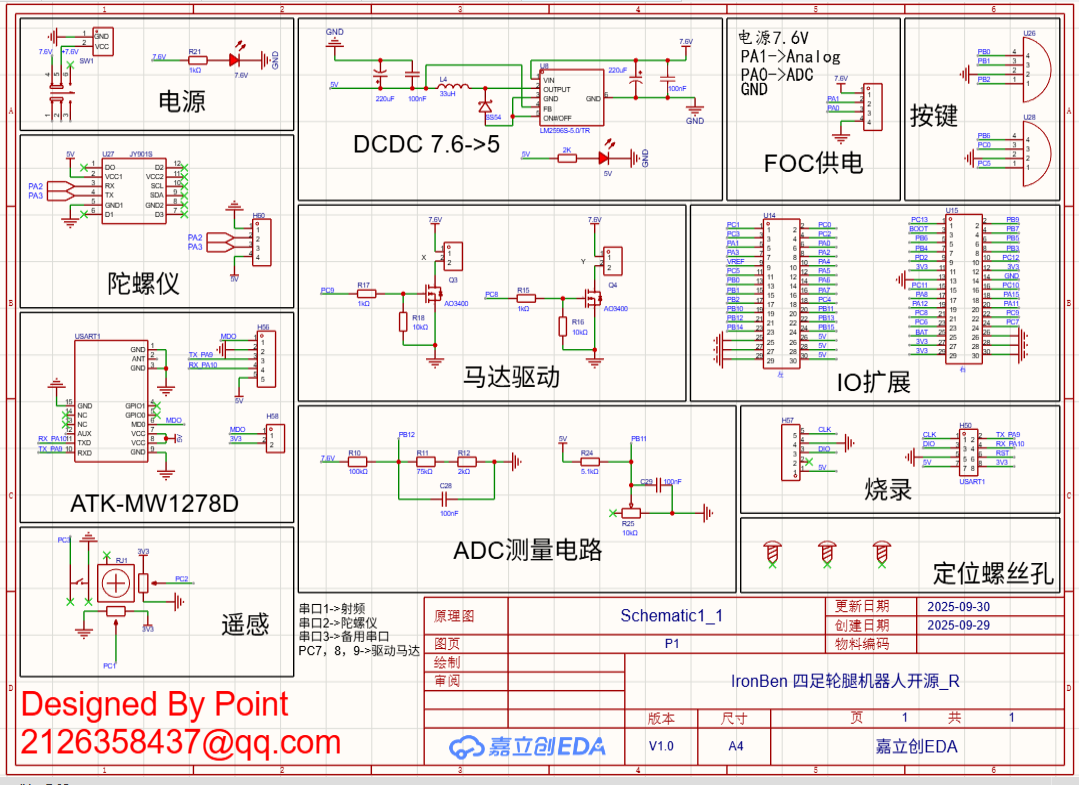
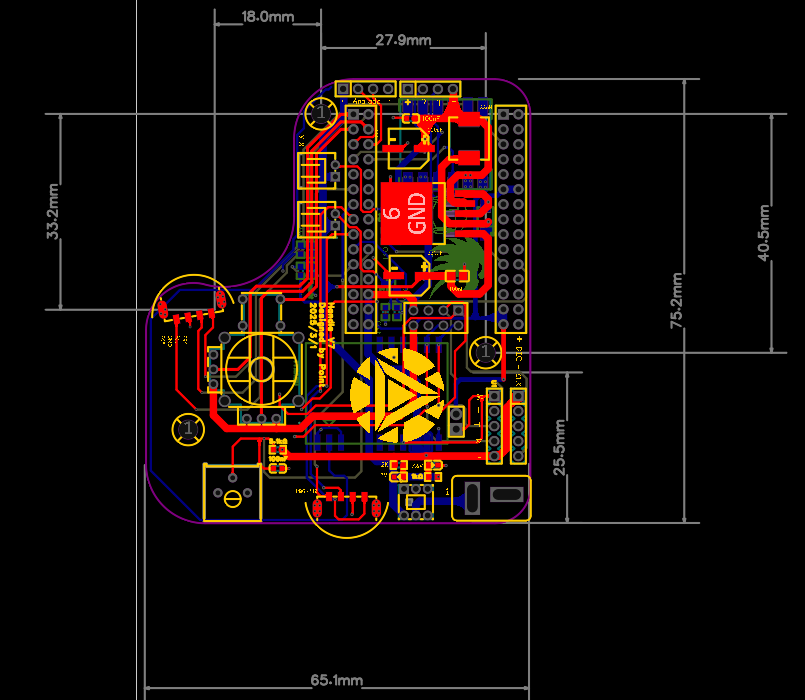
作者用嘉立创EDA设计了3块PCB,分别是——机器人的核心板、拓展板、体感控制手柄,设计图如下:
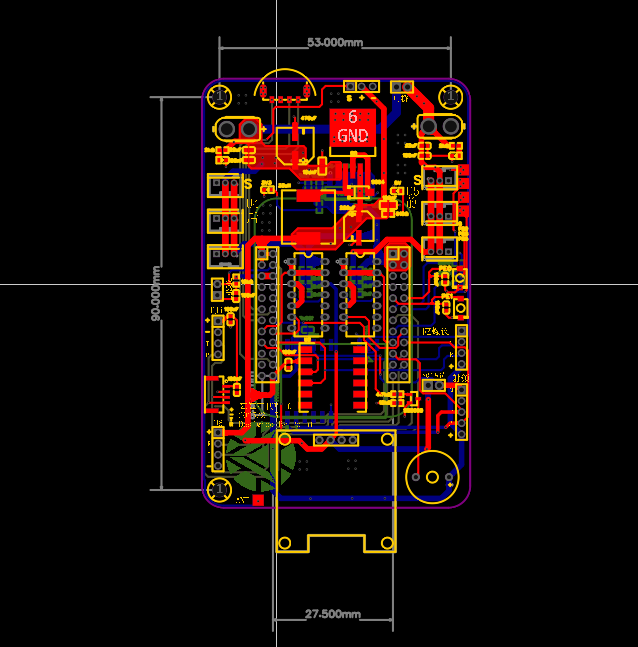
硬件参数
-
核心板主控:STM32F407VET6,搭载双电源输入设计,为两路舵机提供冗余供电
-
板载按键模块支持一键烧录与状态切换
-
存储扩展:外接W25Q64 Flash芯片,支持程序存储与实时数据缓存。
-
预留LORA远距离通信接口与SWD调试端口,方便远程控制和排查问题
-
手柄板主控:STM32G431RBT6,带1.47寸屏幕
-
拓展板:设计 I²C / 串口接口,可为主控板稳定连接陀螺仪、射频模块、大疆电机等核心外设;同时集成 7 路 PWM 输出和 4 个自定义串口,支持舵机群控与电机驱动,适配仿生步态和轮式移动,满足多模态运动控制需求
-
串行总线舵机:RX8-U50H-M,12V/5.5A/66W,采用74HC125N实现UART全双工转半双工
-
直流无刷电机: M3508,24V/20A,重量:35g,空载转速482rpm,最大持续扭矩3N*m,3N*m下最大转速469rpm,通过DJIA板驱动
-
电池:6 电芯 75C 放电倍率航模电池,24V,连接到扩展板上经降压稳压模块分成2路电源,5V为大部分模块提供电源,3V3主要给单片机供电
怎么样?
你喜欢这个作品吗
或想了解开源项目[源码][硬件]等资料
就下滑吧!
▼▼
开源网址:https://oshwhub.com/birdd/ironben-si-zu-lun-tui-ji-qi-ren-kai-yuan-_r




