

本文作者:立创EDA开源平台 OSHWHub 用户@Dimsmary,点击查看原文章
打造一个BlackEye——彩虹六号里的黑眼。具体功能为:控制板通过NRF控制摄像头的移动。

描述
1 项目开发工具(Project Development Tools)
1.1 单片机开发(MCU Development)
单片机使用的是 Atmega32U4 并使用 Arduino 进行开发。Atmega32U4 对应 Arduino 的 Leonardo
1.2 PCB绘制(Pcb Layout)
PCB绘制使用的是立创EDA
1.3 3D模型构建(3D Software)
SolidWorks.
2 文件内容介绍(File description)
2.1 3D_Model
包括了使用SolidWorks绘制的外壳源文件和用于3D打印的STL文件。
2.2 Arduino_Code
包括了黑眼和控制器的Arduino源代码,不包括使用到的NRF/OLED库。
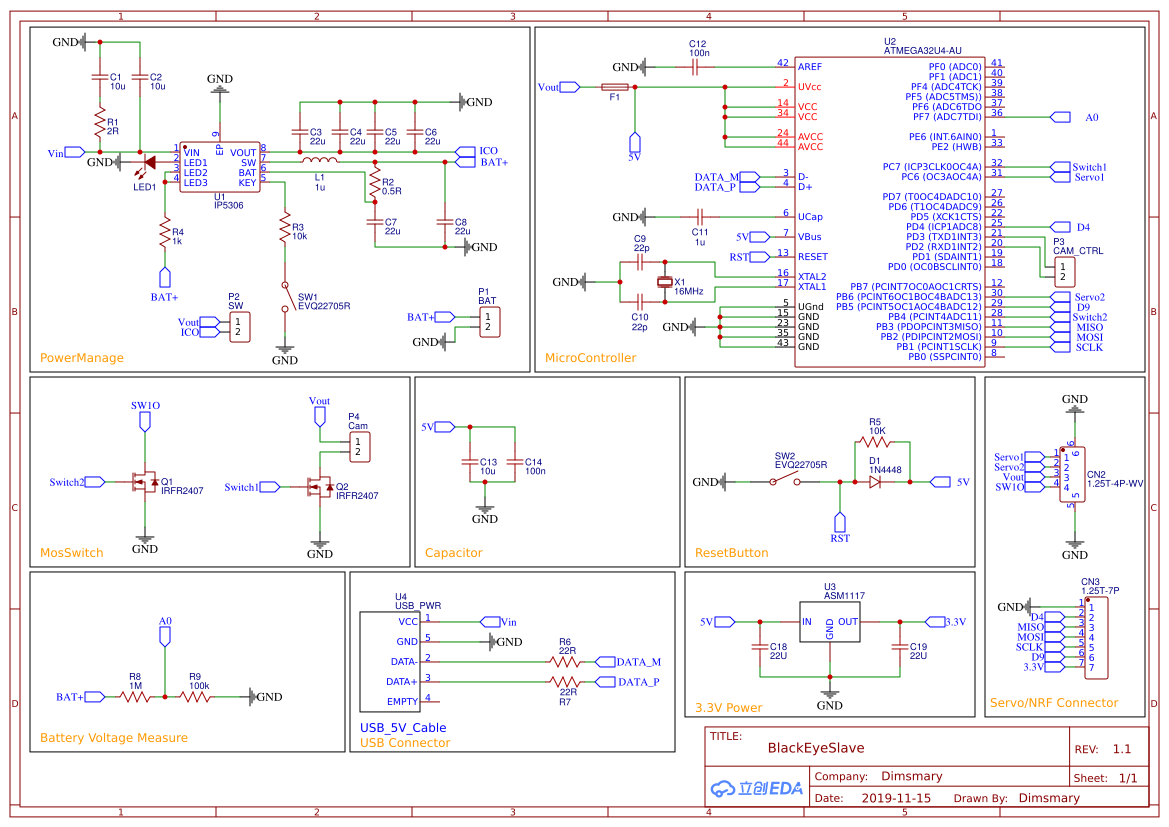
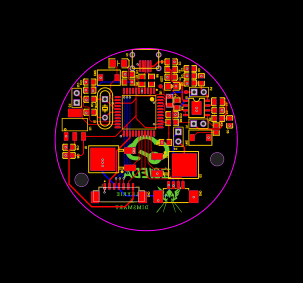
2.3 PCB
包括了黑眼和控制器的PCB原理图和PCB图。
3 基本工作原理
Arduino代码分为两个部分:Master & Slave, Master为控制板的程序,Slave为黑眼的程序。
3.1 Master
3.1.1 运行机制:
在控制板启动后,setup()部分将进行初始化。
1)初始化NRF模块,启动ACK模式。
2)初始化Analog IO: A0 A1。对应摇杆电位器。
3)初始化按钮中断。(按钮直接使用中断进行输入,而不是扫描。反正中断够用XD)
4)初始化OLED 并显示两秒的 Black Eye 图标。
初始化完成后,在loop()中控制板将不断通过NRF发送数据(command 7),并企图获取ACK返回包。
如果返回包的数据返回正确则连接成功,画面进入工作模式。
ACK返回包中包括了以下信息:舵机速度,电池电压,图传开关状态,舵机开关状态。
不论是否连接成功,控制板仍会发送控制命令:
command 1/2/3/4 :用于控制舵机
command 5/6/8: 用于控制舵机电源 / 图传电源 / 更改舵机速度
如果超过3秒发送Command7无应答则判定为连接断开。
3.2 Master
3.2.1 运行机制:
与Master类似,setup()进行NRF和IO初始化。A0获取电池电压,control1/2用于开关控制图传和舵机电源的MOS管。
在loop()中将不断接收Mster传来的命令,处理后通过ack返回。
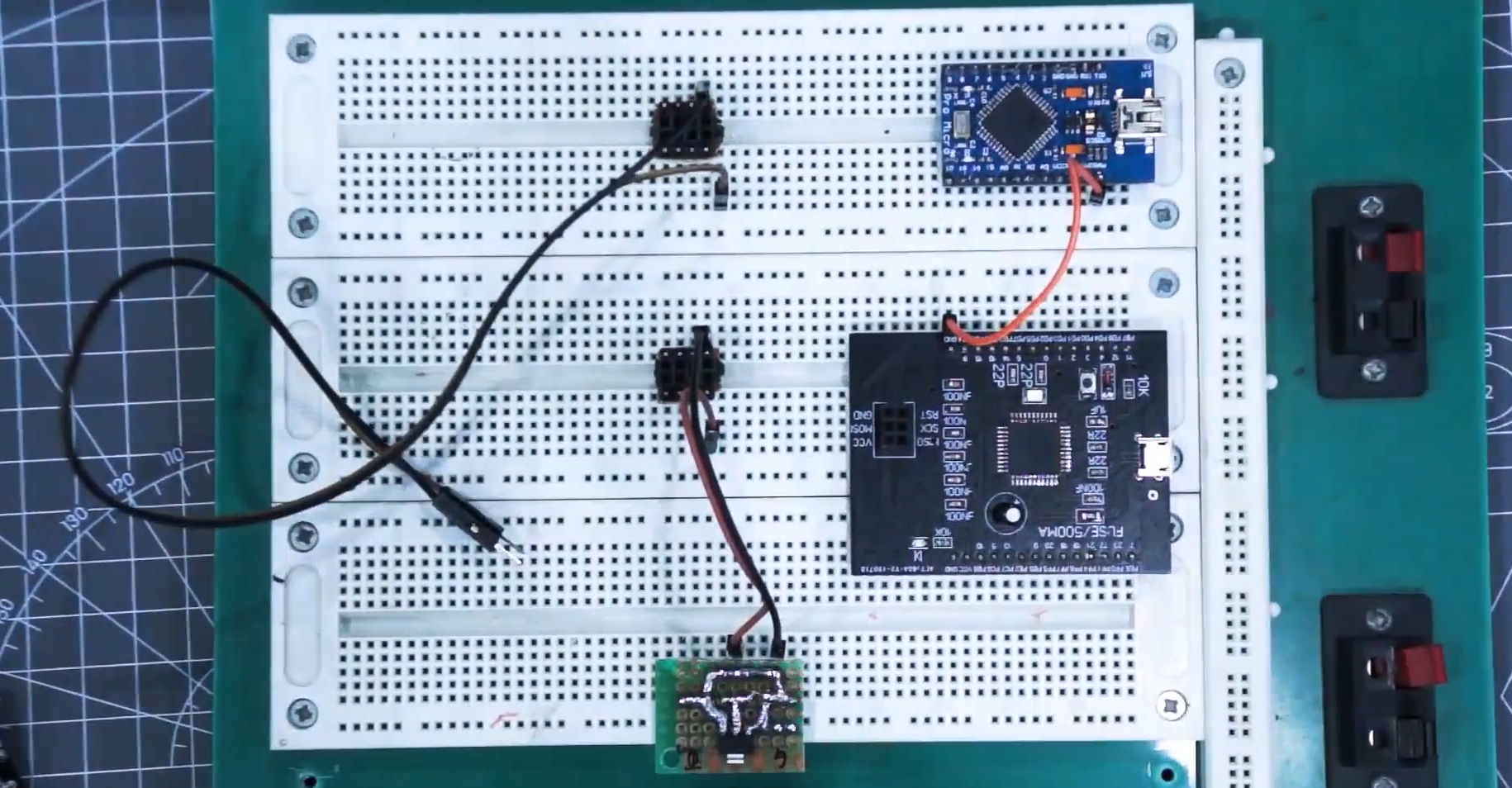
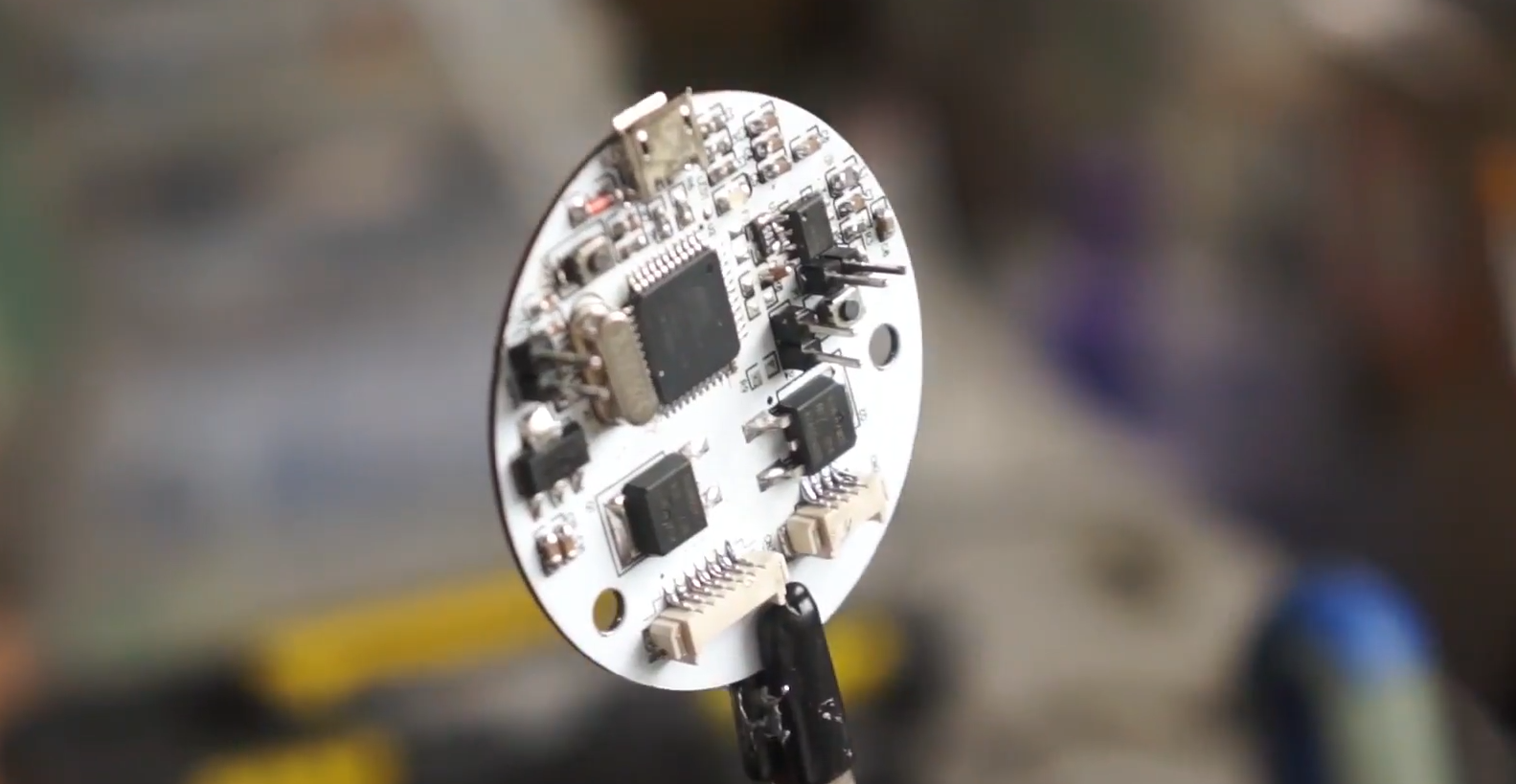
制作过程:(详细过程请查看上述视频)




文档

Black_EYE_MASTER copy(进入立创EDA编辑器打开)
Black_EYE_SLAVE copy(进入立创EDA编辑器打开)

Black_EYE_MASTER copy(进入立创EDA编辑器打开)
Black_EYE_SLAVE copy(进入立创EDA编辑器打开)
BOM-部分在售型号推荐(点击商品编号可查看产品详细信息)
| 商品编号 | 型号 | 品牌 | 规格 |
|
C44854 |
ATMEGA32U4-AU |
MICROCHIP(美国微芯) |
QFP-44_10x10x08P |
|
C54037 |
1N4448 |
ST(先科) |
DO-35 |
| C181692 |
IP5306 |
INJOINIC(英集芯) |
ESOP-8 |
|
C79156 |
EVQ22705R |
PANASONIC(松下) |
Through Hole |
|
C114981 |
E49A16E00000KE10CO |
HOSONIC(台湾鸿星) |
HC-49S |
您可以在上述立创EDA工程中下载完整BOM或直接在立创商城下单
工程附件:
以上分享来自立创EDA开源平台 OSHWHub 用户@Dimsmary,请自行验证。




